LMEC-7 पोहलको पेन्डुलम
LMEC-7 को लागि सोधपुछ पेश गर्नुहोस्, हामी तपाईंलाई 24 घण्टामा सम्पर्क गर्नेछौं।पोहलको पेन्डुलम
प्रयोगहरू
१.मुक्त दोलन - ब्यालेन्स व्हील θ को आयाम र मुक्त दोलन अवधि T बीचको पत्राचारको मापन
२. ड्याम्पिङ फ्याक्टर β को निर्धारण।
३. जबरजस्ती कम्पनहरूको आयाम-फ्रिक्वेन्सी विशेषता र चरण-फ्रिक्वेन्सी विशेषता वक्रहरूको निर्धारण।
४. जबरजस्ती कम्पनहरूमा विभिन्न ड्याम्पिङको प्रभावको अध्ययन र अनुनाद घटनाको अवलोकन।
५. चरण भिन्नता जस्ता गतिशील वस्तुहरूको निश्चित मात्रा निर्धारण गर्न स्ट्रोबोस्कोपिक विधि प्रयोग गर्न सिक्नुहोस्।
मुख्य निर्दिष्टीकरणहरू
| वसन्त जिद्दी कारक K | मुक्त कम्पन अवधिमा २% भन्दा कम परिवर्तन |
| समय मापन | शुद्धता ०.००१ सेकेन्ड, चक्र मापन त्रुटि ०.२% |
| मेकानिकल पेन्डुलम | अनुक्रमणिका स्लटहरू सहित, अनुक्रमणिका २°, त्रिज्या १०० मिमी |
| आयाम मापन | त्रुटि ±१° |
| फोटोइलेक्ट्रिक सेन्सर A | दोहोरो फोटोइलेक्ट्रिक संकेतहरूको पहिचान |
| फोटोइलेक्ट्रिक सेन्सर B | एकल फोटोइलेक्ट्रिक संकेतहरूको पहिचान |
| मोटर गति (फोर्सिङ फ्रिक्वेन्सी) दायरा | ३० - ४५ आरपीएम र निरन्तर समायोज्य |
| मोटर गति अस्थिरता | ०.०५% भन्दा कम, स्थिर परीक्षण चक्र सुनिश्चित गर्दै |
| प्रणाली ड्याम्पिङ | प्रति आयाम क्षय २° भन्दा कम |
विवरणहरू
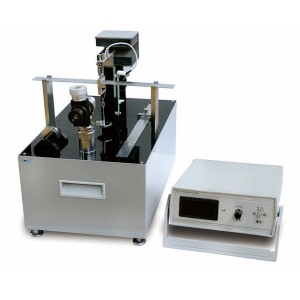
प्रणालीका अवयवहरू: पोहल अनुनाद प्रयोगात्मक उपकरण, पोहल अनुनाद प्रयोगात्मक नियन्त्रक, छुट्टै फ्ल्यास असेम्बली, २ वटा फोटोइलेक्ट्रिक सेन्सरहरू (प्रकार A र प्रकार B को एक-एक)
पोहल अनुनाद प्रयोगात्मक सेट-अप।
१. वसन्त जिद्दी कारक K: मुक्त कम्पन अवधिमा २% भन्दा कम परिवर्तन।
२. समय मापन (१० चक्र): शुद्धता ०.००१ सेकेन्ड, चक्र मापन त्रुटि ०.२%।
३. विद्युत चुम्बकीय ड्याम्पिङको अभावमा प्रणाली ड्याम्पिङ: प्रति आयाम क्षय २° भन्दा कम।
४. मेकानिकल पेन्डुलम: अनुक्रमणिका स्लटहरू सहित, अनुक्रमणिका २°, त्रिज्या १०० मिमी।
५. आयाम मापन: त्रुटि ±१°; आयाम मापन विधि: फोटोइलेक्ट्रिक पत्ता लगाउने।
६. फोटोइलेक्ट्रिक सेन्सर A: दोहोरो फोटोइलेक्ट्रिक संकेतहरूको पहिचान; फोटोइलेक्ट्रिक सेन्सर B: एकल फोटोइलेक्ट्रिक संकेतहरूको पहिचान।
७. मोटर गति (फोर्सिङ फ्रिक्वेन्सी) दायरा: ३० - ४५ आरपीएम र निरन्तर समायोज्य।
८. मोटर गति अस्थिरता: ०.०५% भन्दा कम, स्थिर परीक्षण चक्र सुनिश्चित गर्दै।
९. चरण भिन्नता निर्धारण।
चरण भिन्नता निर्धारणका दुई विधिहरू: स्ट्रोबोस्कोपिक र मेट्रोलोजिकल, दुई विधिहरू बीच ३° भन्दा कमको विचलनको साथ।
मेट्रोलोजिकल विधिको मापन दायरा ५०° र १६०° को बीचमा हुन्छ।
स्ट्रोबोस्कोपिक मापन दायरा ०° र १८०° बीच; दोहोरिने मापन विचलन <२°।
१०. फ्ल्यास: कम भोल्टेज ड्राइभ, प्रयोगात्मक एकाइबाट अलग फ्ल्यास, २ मिलिसेकेन्ड निरन्तर फ्ल्यास समय, आकर्षक रातो रंग।
११. सामूहिक प्रयोगको क्रममा कम आवाज, कुनै बाधा वा असुविधा नहुने।
पोहल अनुनाद प्रयोगात्मक नियन्त्रक।
१. डेटा सङ्कलन र प्रदर्शन गर्न एउटा विशेष प्रयोगात्मक नियन्त्रक प्रयोग गरिन्छ; प्रयोगलाई मार्गदर्शन गर्न मेनुहरू सहितको ठूलो डट-म्याट्रिक्स LCD डिस्प्ले प्रयोग गरिन्छ, नोटहरू प्रम्प्ट गर्ने (इलेक्ट्रोनिक निर्देशन पुस्तिका), र प्रयोगात्मक डेटा प्रदर्शन र जाँच गर्ने।
२. स्ट्रोबहरूको लागि समर्पित नियन्त्रण इन्टरफेस।